40
Сопроцессоры (каналы) ввода–вывода: назначение структуры, режимы работы.
Основное отличие сопроцессора ввода–вывода и контроллера ПДП.
По мере развития систем В/ВЫВ их функции
усложняются. Главная цель такого усложнения — максимальное высвобождение ЦП от управления
процессами ввода/вывода. Некоторые пути решения этой задачи уже были
рассмотрены. Следующими шагами в преодолении проблемы могут быть:
1. Расширение возможностей МВБ и предоставление ему прав процессора
со специализированным набором команд, ориентированных на операции ввода/вывода.
ЦП дает указание такому процессору В/ВЫВ выполнить хранящуюся в памяти ВМ
программу ввода/вывода. Процессор В/ВЫВ извлекает и исполняет команды этой
программы без участия центрального процессора и прерывает ЦП только после
завершения всей программы ввода/вывода.
2. Рассмотренному
в пункте 1 процессору ввода/вывода придается собственная локальная память, при
этом возможно управление множеством устройств В/ВЫВ с минимальным привлечением
ЦП.
В первом случае МВВ называют каналом
ввода/вывода (КВВ). а во втором – процессором ввода/вывода. В
принципе различие между каналом и процессором ввода/вывода достаточно условно,
поэтому в дальнейшем будем пользоваться термином «канал».
Концепция системы ввода/вывода с КВВ
характерна для больших универсальных вычислительных машин (мэйнфреймов), где
проблема эффективной организации В/ВЫВ и максимального высвобождения
центрального процессора в пользу его основной функции стоит наиболее остро.
В ВМ с каналами ввода/вывода центральный
процессор практически не участвует в непосредственном управлении внешними
устройствами, делегируя эту задачу специализированному процессору, входящему в
состав КВВ. Все функции ЦП сводятся к запуску и остановке операций в КВВ, а
также проверке состоят канала и подключенных к нему ВУ. Для этих целей ЦП
использует лишь несколько (от 4 до 7) команд ввода/вывода. Например, в IBM 360 таких команд четыре:
■ «Начать ввод/вывод»;
■ «Остановить ввод/выводу;
■ «Проверить ввод/вывода;
■ «Проверить канал».
КВВ реализует операции В/ВЫВ путем
выполнения так называемой канальной программы. Канальные программы для
каждого ВУ, с которым предполагается обмен информацией, описывают нужную
последовательность операций ввода/вывода и хранятся в основной памяти ВМ. Роль
команд в канальных программах выполняют управляющие слова канала (УСК),
структура которых отличается от структуры обычной машинной команды. Типовое УСК
содержит:
■ код операции, определяющий
для КВВ и ВУ тип операции: «Записать» (вывод информации из ОП в ВУ),
«Прочитать» (ввод информации из ВУ в ОП), «Управление» (перемещение головок
НМД, магнитной ленты и т. п.);
■ указатели — дополнительные
предписания, задающие более сложную последовательность операций В/ВЫВ, например
при вводе пропускать отдельные записи или наоборот — с помощью одной команды
вводить «разбросанный» по ОП массив как единый;
■ адрес данных, указывающий
область памяти, используемую в операции ввода/ вывода;
■ счетчик данных, хранящий
значение длины передаваемого блока данных.
Кроме того, в УСК может содержаться
идентификатор ВУ и информация о его уровне приоритета, указания по действиям,
которые должны быть произведены при возникновении ошибок и т. п.
Центральный процессор инициирует
ввод/вывод путем инструктирования канала о необходимости выполнить канальную
программу, находящуюся в ОП, и указания начального адреса этой программы в
памяти ВМ. КВВ следует этим указаниям и управляет пересылкой данных. Отметим,
что пересылка информации каналом ведется в режиме прямого доступа к памяти. ВУ
взаимодействуют с каналом, получая от него приказы. Таким образом, в ВМ с КВВ
управление вводом/выводом строится иерархическим образом. В операциях
ввода/вывода участвуют три типа устройств:
■ процессор (первый уровень
управления);
■ канал ввода/вывода (второй
уровень);
■ внешнее устройство (третий
уровень).
Каждому типу устройств соответствует свой
вид управляющей информации:
■ процессору — команды ввода/вывода;
■ каналу - управляющие слова канала;
■ периферийному устройству -
приказы.
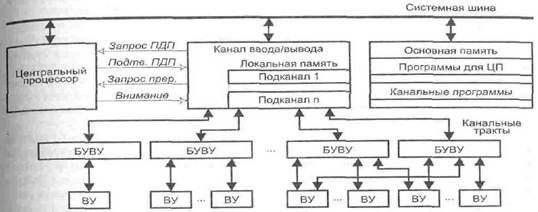
Структура ВМ с канальной системой ввода/вывода
показана на рис. 8.12.
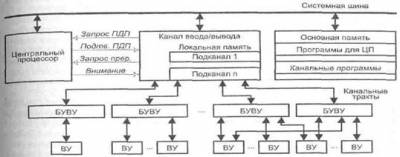
Обмен информацией между КВВ и основной
памятью осуществляется посредством системной шины ВМ. ВУ подключаются к каналу
не непосредственно, а через блоки управления внешними устройствами (БУВУ). БУВУ
принимает от канала приказы по управлению внешним устройством (чтение, запись,
перемещение носителя или магнитной головки и т.п.) и преобразует их в сигналы
управления, свойственные данному типу ВУ. Обычно один БУВУ может обслуживать
несколько однотипных ВУ, но для подключения быстродействующих внешних устройств
Часто применяются индивидуальные блоки, управления. В свою очередь, некоторые
ВУ могут подключаться одновременно к нескольким БУВУ, Это позволяет
воспользоваться свободным трактом другого БУВУ при занятости данного БУВУ
обслуживанием одного из подключенных к нему ПУ. Физически БУВУ может быть
самостоятельным устройством или интегрирован с ВУ или каналом.
Обмен информацией между БУВУ и КВВ
обеспечивается так называемыми канальными трактами. Обычно каждое БУВУ
связано с одним из канальных трактов, но возможно также подключение блока
управления сразу к нескольким тракам, что дает возможность избежать
нежелательных задержек при занятости одного из них.
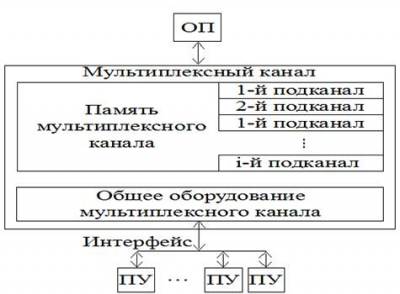
В пределах канала ввода/вывода считается,
что каждое ВУ подключено к своему подканалу. Подканалы имеют свои
уникальные логические номера, с помощью которых канальная программа адресуется
к конкретному ВУ. Физически подканал реализуется в виде участка памяти, в
котором хранятся параметры операции ввода/вывода, выполняемой данным ВУ: текущие значения
адреса и счетчика данных, код и указатели операции ввода/вывода, адрес
следующего УСК и др. Для хранения этих параметров обычно используется локальная
память канала.
Обмен информацией между ВУ и ОП, как уже
упоминалось, реализуется в режиме прямого доступа к памяти, при этом для
взаимодействия ЦП и канала задействованы сигналы «Запрос ПДП» и «Подтверждение
ПДП».
Чтобы известить ЦП об окончании текущей
канальной программы или об ошибках, возникших при ее выполнении, КВВ выдает в
ЦП сигнал «Запрос прерывания». В свою очередь, ЦП может привлечь внимание
канала сигналом «Внимание».
Способ организации взаимодействия ВУ с
каналом определяется соотношением быстродействия ОП и ВУ. По этому признаку ВУ
образуют две группы: быстродействующие (накопители на магнитных дисках (НМД),
накопители на магнитных лептах (НМЛ)) со скоростью приема и выдачи информации
около 1 Мбайт/с и медленнодействующие (дисплеи, печатающие устройства и др.) со
скоростями порядка 1 Кбайт/с и менее. Быстродействие основной памяти обычно
значительно выше. С учетом производительности ВУ в КВВ реализуются два режима работы:
мультиплексный (режим разделения времени) и монопольный.
В мультиплексном режиме несколько
внешних устройств разделяют канал во времени, при этом каждое из параллельно
работающих с каналом ВУ связывается с КВВ на короткие промежутки времени только
после того, как ВУ будет готово к приему или выдаче очередной порции информации
(байта, группы байтов и т. д.). Такая схема принята в мультиплексном канале
ввода/вывода. Если в течение сеанса связи пересылается один байт или
несколько байтов, образующих одно машинное слово, канал называется байт-мультиплексным.
Канал, в котором в пределах сеанса связи пересылка данных выполняется
поблочно, носит название блок-4 мультиплексного.
В монопольном режиме после
установления связи между каналом и ВУ последнее монополизирует канал на все
время до завершения инициированной процессором канальной программы и всех
предусмотренных этой программой пересылок данных между ВУ и ОП. На все время
выполнения канальной программы канал оказывается недоступным для других ВУ.
Данную процедуру обеспечивает селекторный канал ввода/вывода. Отметим,
что в блок-мультиплексном канале в рамках сеанса связи пересылка блока
осуществляется в монопольном режиме.
Помимо указанных функций на
канал может возлагаться ряд дополнительных для минимизации участия процессора в
операциях I/O:
·
Организация
цепочки данных.
Для случаев, когда массив информации, предназначенный для операции ввода или
вывода с некоторым ПУ, не располагается в памяти подряд, а состоит из
нескольких подмассивов, размещенных в произвольно расположенных участках ОП.
Чтобы в этом случае ввод (вывод) каждого подмассива не требовал включения в
программу процессора отдельной команды ввода (вывода), а передача всех
подмассивов инициировалась одной командой процессора, канал должен допускать
задание в программе управления каналом цепочки для передачи такого составного
массива.
·
Организация
пропуска информации.
При операциях I/O может
возникнуть необходимость переносить в память с носителя информации отдельные
части массива, пропуская ненужные данные.
·
Формирование
запросов прерывания от I/O. Канал должен прерыванием извещать
процессор об окончании каждой операции I/O, а также об
обнаружении ошибки или каких-либо других необычных условий, вследствие чего
произошло принудительное окончание выполняемой операции. Наряду с этим должна
иметься возможность задания прерывания на любом этапе операции I/O. Такое
прерывание называется программно-управляемым. Оно не нарушает нормальное
выполнение текущей операции I/O. Появление
запроса программно-управляемого прерывания означает, что выполнены все операции
I/O, предшествующие
в программе управления каналом этому запросу.
·
Управляющая
информация для операций I/O. В операциях I/O участвуют три
типа устройств: процессор (превый уровень управления), сопроцессор I/O (второй
уровень), ПУ (третий уровень). Каждому типу устройств соответствует
определенный вид управляющей информации: процессору – команды, сопроцессору –
управляющие слова канала (УСК), ПУ – приказы. Кроме того, в управлении I/O используются
коды состояния канала (слово состояния сопроцессора) и ПУ (байт состояний и
байты уточненного состояния). Команды I/O процессора (!)
являются привилегированными и выполняются только в состоянии «супервизор».
Классификация
сопроцессоров I/O

В зависимости от
соотношения быстродействия ОП и ПУ в каналах I/O
могут реализовываться два режима работы: монопольный (селекторный), разделения
времени (мультиплексирования).
<-Монопольный режим. После установки связи между каналом и ПУ последнее
монополизирует канал на все время, пока полностью не завершится инициированная
процессором программа управлением сопроцессором I/O
работы с данным ПУ и не будут произведены все предусмотренные этой программой
передачи данных между ОП и ПУ. На все время выполнения данной программы I/O
канал оказывается занятым для других ПУ.
Режим разделения времени
-> (мультиплексный). Несколько ПУ
разделяют во времени канал I/O, при этом каждое из параллельно работающих с данным
каналом ПУ связывается с каналом на короткие промежутки времени только после
того, как ПУ подготовлено к приему или выдаче очередной порции информации.
Промежуток времени, в течение которого происходит передача информации между
каналом и подготовленным к этому ПУ, может быть назван сеансом связи. Сеансы
связи различных ПУ чередуются между собой. Во время сеанса связи одного из
устройств с каналом другие устройства могут выполнять работу не требующую использования
средств канала. В соответствии с преимущественно реализуемым режимом работы
различают каналы I/O мультиплексный, осуществляющий мультиплексирование
ПУ, и селекторный, взаимодействующий с ПУ в монопольном режиме.
Сопроцессор может иметь свои
управляющие слова.