20. Назначение, функции структуры
контроллеров прерываний. Примеры
На аппаратном уровне прерывания работают следующим
образом. Когда устройство ввода-вывода заканчивает работу, оно инициирует
прерывание (при условии, что прерывания разрешены ОС). Для этого устройство
выставляет сигнал на выделенную устройству специальную линию шины – линия
запроса. В структуре системы прерываний «с индивидуальными линиями запроса»
(радиальная структура) сколько устройств, столько и линий запроса прерываний, а
значит нужно, чтобы процессор должен иметь столько же входов запроса
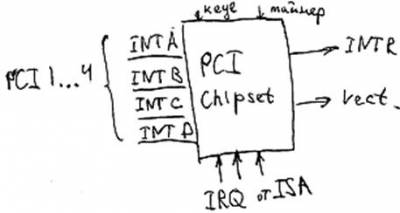
прерываний. На практике поступают так: между линиями запроса и процессором есть
промежуточное звено – контроллер прерываний (сокращение PIC).
Его назначение в следующем: он должен формировать для процессора 1 бит запроса
прерывания INT и Vector. PIC имеет индивидуальный вход для каждой линии запроса.

PIC
(контроллер) может быть встроен в процессор.
Функции контроллера.
· запоминание запросов
· формирование сигнала INT
· формирование запрета прерываний
· 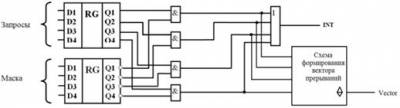
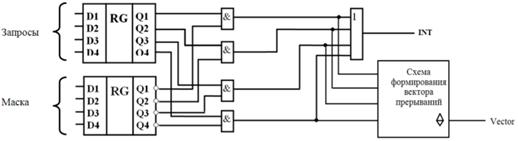
маскирование
прерываний – то есть запрет обработки некоторых запросов. Пример схемной
реализации:
· формирование Vector
· прием подтверждений о том, что CPU обработал
прерывание
По способам опроса устройств можно выделить следующие
структуры контроллеров:
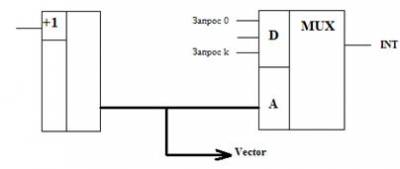
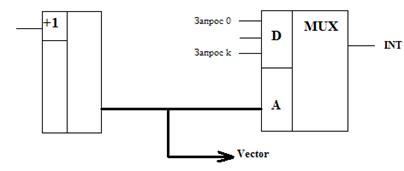
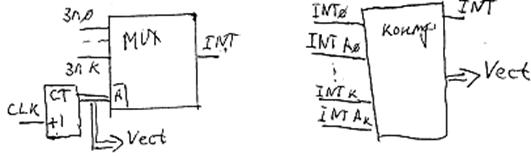
1)
Последовательный опрос – счетчик
непрерывно считает и последовательно опрашивает устройства (в качестве счетчика
может быть регистр сдвига, в котором по кругу бегает «1»). Реализует «круговую
систему приоритетов».
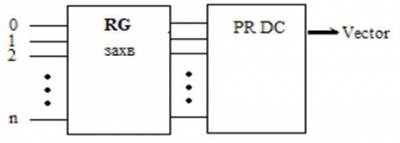
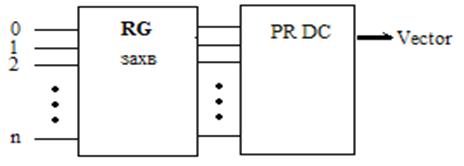
2)
Приоритетный опрос – система с
жесткими приоритетами. Требует приоритетный шифратор (PR DC).
Приоритеты устанавливаются порядком подключения устройств к контроллеру.
3) последовательный опрос.
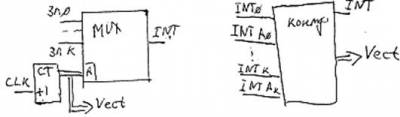
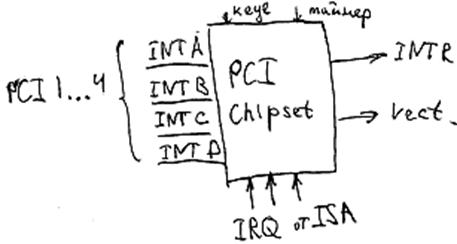
Пример. – контролер 8259А имеет 8 выходов запросов (IRQ)
и выход запроса INTR, после чего CPU формирует 2 цикла
подтверждения прерывания INTA, во втором цикле контролер передает по DB
8-битный вектор прерывания.